设置登录密码
*密码
*确认密码
完善信息
*真实姓名
*公司名称
*您的职位
城市
*邮箱
*主营产品
*行业
企业类型
材质
功能







来源:材料科学与工程微信公众号|
发表时间:2019-04-11
点击:20772
文章来源:深圳先进技术研究院
柔性传感器是可穿戴医疗、机器人等领域的研究热点。柔性应变传感器已经成为未来发展智能器件的重点研究方向,其在人机交互系统、电子皮肤、人体运动行为监测系统等领域具有广阔的应用前景。其中,可拉伸性、灵敏度、稳定性、可靠性和舒适性是应变传感器的重要性能指标,如何在实现高可拉伸性的同时大幅度提高灵敏度和可重复性仍然是目前面临的一个挑战。
为此,该课题组成员提出了一种基于微通道的优化设计、利用液态金属制备的柔性可拉伸传感器的方法。研究团队利用有限元仿真优化结果,设计制备柔性可拉伸传感器,实验结果表明该柔性传感器可在590%的拉伸,270o扭转和180o弯曲的情况正常工作。当拉伸550%,灵敏度GF可达4.95,拉伸重复率误差<0.1%,为实现人体手指、手腕等关节等运动精准测量提供了可行性方法,充分展示了其在柔性可穿戴电子设备领域的良好应用价值。
该研究得到了国家自然科学基金-深圳机器人联合基金重点支持“穿戴式精确定位介入手术机器人的力觉感知与导丝操控机理(U1713219)”等项目的资助。
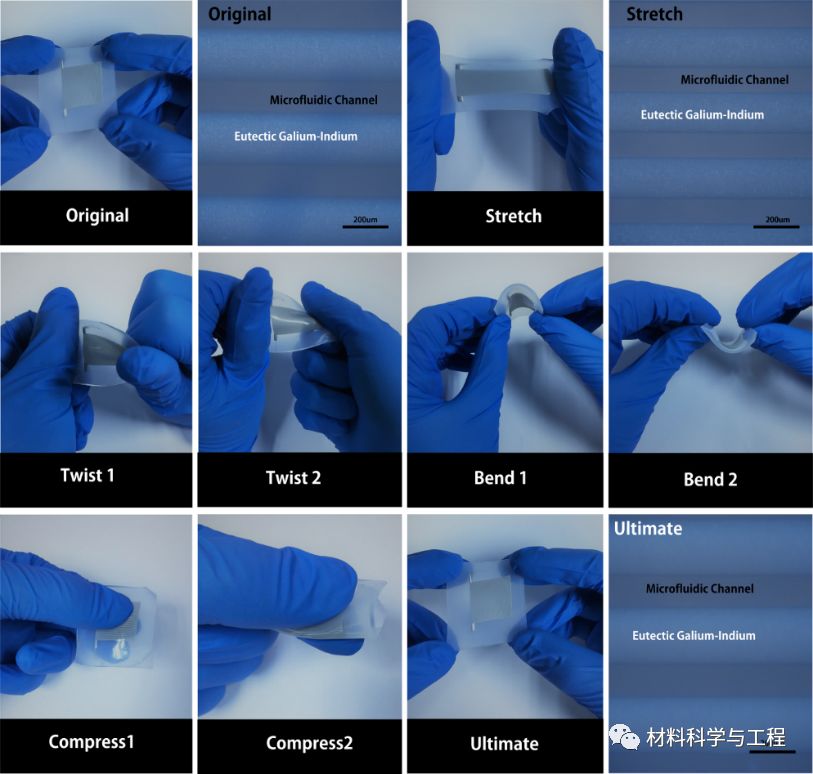
柔性传感器的拉伸、扭转和弯曲
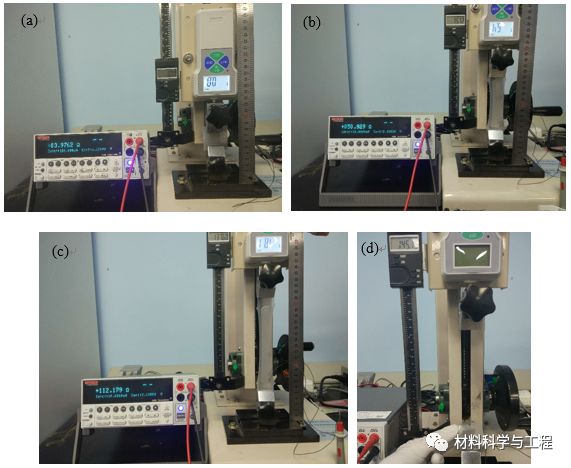
超高可拉伸传感器的拉伸实验
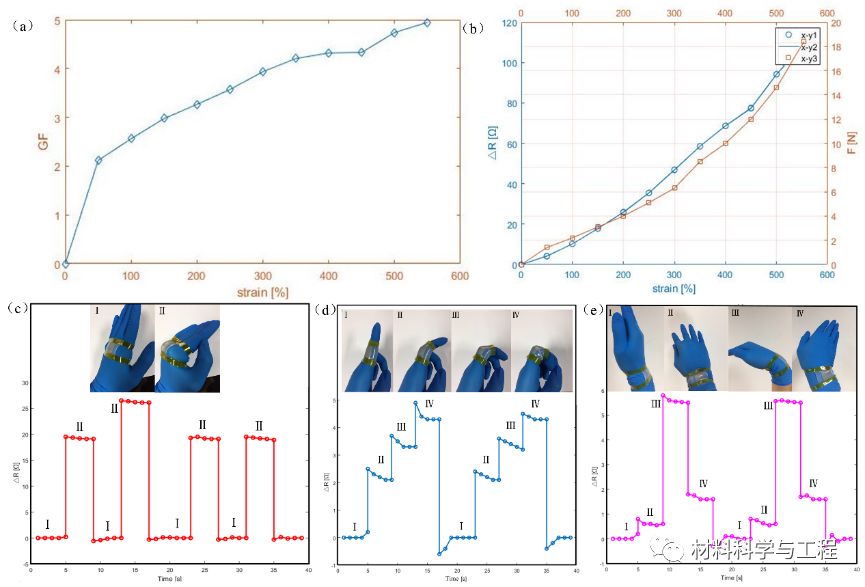
可拉伸传感器的特性分析和应用示范
“本文由新材料在线®平台入驻媒体号材料科学与工程微信公众号提供,观点仅代表作者本人,不代表本网站及新材料在线®立场,本站不对文章内容真实性、准确性等负责,尤其不对文中产品有关功能性、效果等提供担保。本站提醒读者,文章仅供学习参考,不构成任何投资及应用建议。如需转载,请联系原作者。如涉及作品内容、版权和其它问题,请与我们联系,我们将在第一时间处理!本站拥有对此声明的最终解释权。”