设置登录密码
*密码
*确认密码
完善信息
*真实姓名
*公司名称
*您的职位
城市
*邮箱
*主营产品
*行业
企业类型
材质
功能







来源:南极熊3D打印|
发表时间:2019-03-18
点击:13762

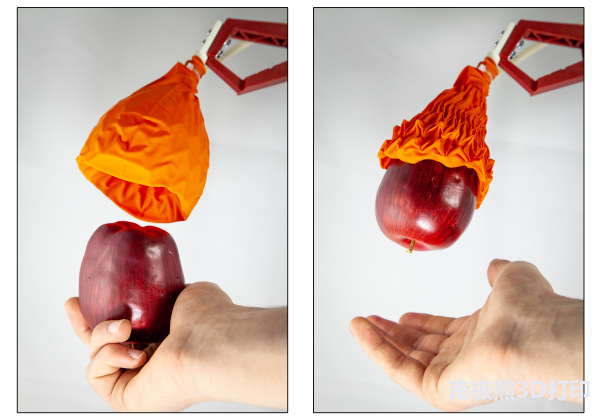
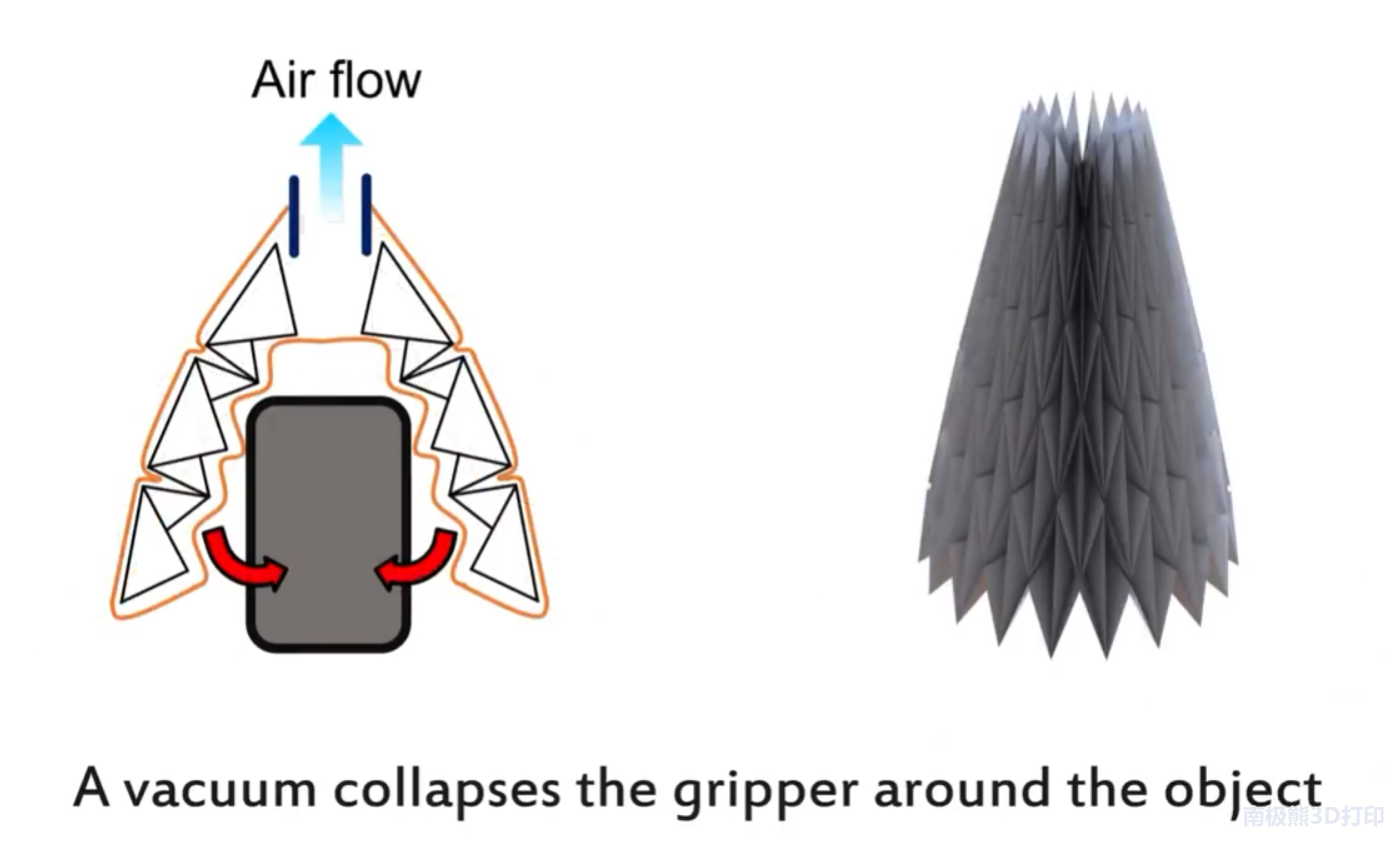
2019年3月18日,南极熊从外媒获悉,来自哈佛大学威斯研究所和马萨诸塞理工学院一组研究人员,开发出一种新型的机器人抓手。


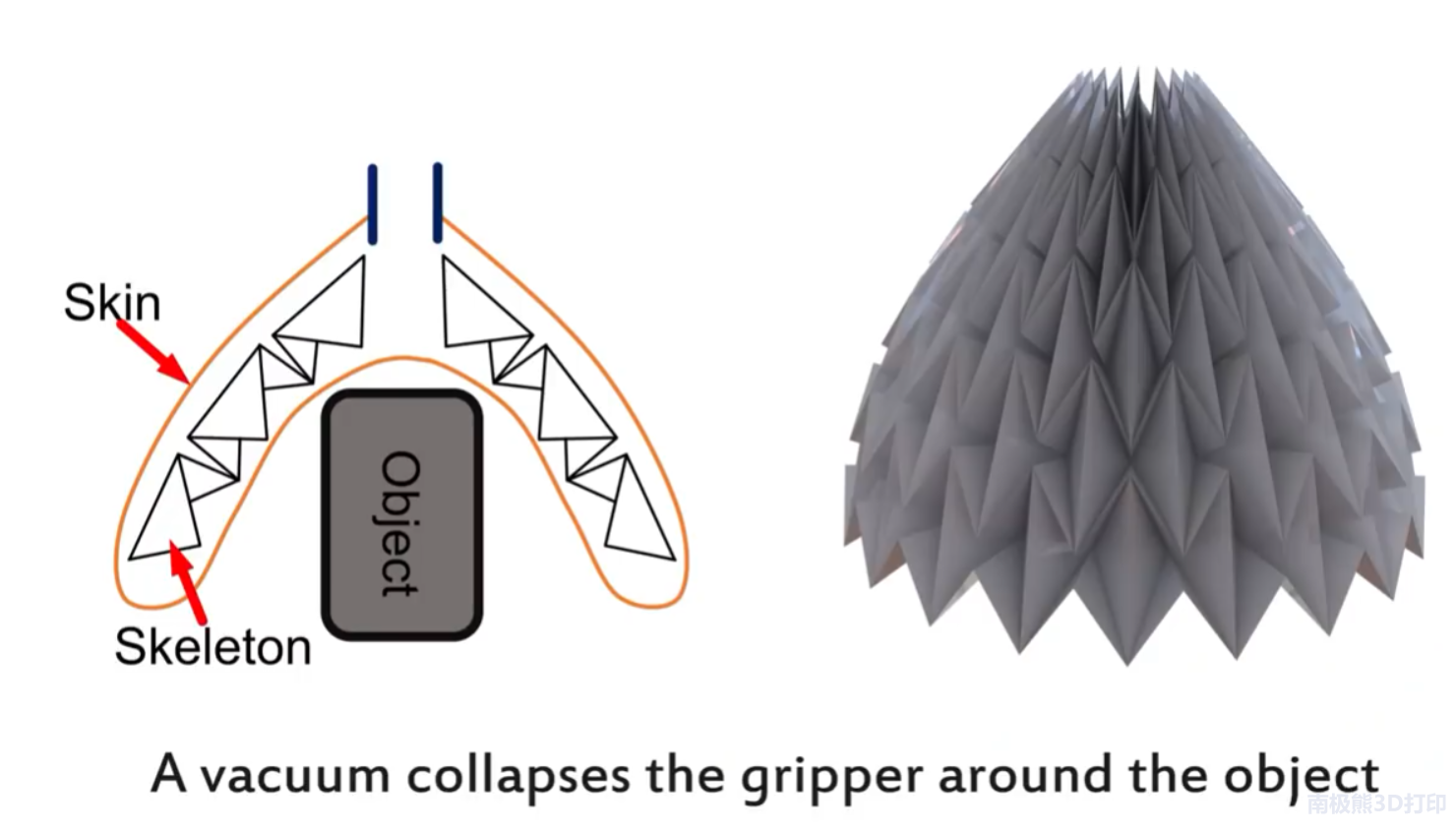
锥形,空心和真空动力设备的灵感来自“折纸魔术球”,它包括三个部分:3D打印,16片硅橡胶骨架,包裹结构的气密皮肤,以及连接器。真空动力设备在抽取真空时,机械手向内凹陷,就像一个堡垒把手一样,从而抓住物体。柔软的机器人抓手可以适应任何抓取的形状,而不会影响其强度。
“这种机械手构造方法的一个关键特征是它的简单性,”哈佛大学工程学院和Wyss生物启发工程研究所的共同作者兼教授罗伯特伍德说。 “所使用的材料和制造策略使我们能够根据需要快速制作新的夹具原型,根据物体或环境进行定制。”
该团队将机械手安装在标准机器人上,以测试其在不同物体上的强度。夹具可以抓住其直径70%的物体,重量可以达到其自身的120倍,而不会损坏它们。它还可以捡起重达4磅的瓶子。

“像亚马逊和京东这样的公司希望能够抓取更多更精致或不规则形状的物体,但不能使用手指式和吸盘式机械手,”李说。 “吸盘无法拾取任何带孔的东西 - 而且它们需要的东西比柔软的手指夹持器强得多。”
“本文由新材料在线®平台入驻媒体号南极熊3D打印提供,观点仅代表作者本人,不代表本网站及新材料在线®立场,本站不对文章内容真实性、准确性等负责,尤其不对文中产品有关功能性、效果等提供担保。本站提醒读者,文章仅供学习参考,不构成任何投资及应用建议。如需转载,请联系原作者。如涉及作品内容、版权和其它问题,请与我们联系,我们将在第一时间处理!本站拥有对此声明的最终解释权。”