设置登录密码
*密码
*确认密码
完善信息
*真实姓名
*公司名称
*您的职位
城市
*邮箱
*主营产品
*行业
企业类型
材质
功能







来源:高分子科学前沿|
发表时间:2019-01-21
点击:24323
随着社会的发展与科技的进步,柔性电子器件与人体集成是电子领域、信息领域和生物医疗领域紧密结合的一大发展趋势。具有可延展、可贴合人体曲面等特点的柔性电子器件能够与人体长时舒适地集成,将在健康监测、医疗诊断、人机交互等多个重要领域发挥作用。
在可延展柔性电子器件的实际应用中,柔性器件很可能会由于其工作环境的复杂性而产生物理或者化学损伤。同时,医学上需要将可植入器件的刚硬部分与人体隔离,所以我们有必要采用一种可靠的封装方法将柔性电子器件保护或隔离起来。然而,可延展柔性电子器件封装方法的研究目前还是较少的。之前研究者主要提出了两类封装方法——液体封装和固体封装。液体封装方法可以使封装器件保留很好的延展性,但是液体封装材料很容易随着使用时间的推移而发生挥发或泄露,这会让器件持久使用的稳定性受到很大影响。固体封装方法将器件与外界环境隔绝,可以很好的保证器件的稳定性,但是使用固体材料进行封装会让器件的可延展性大大降低。
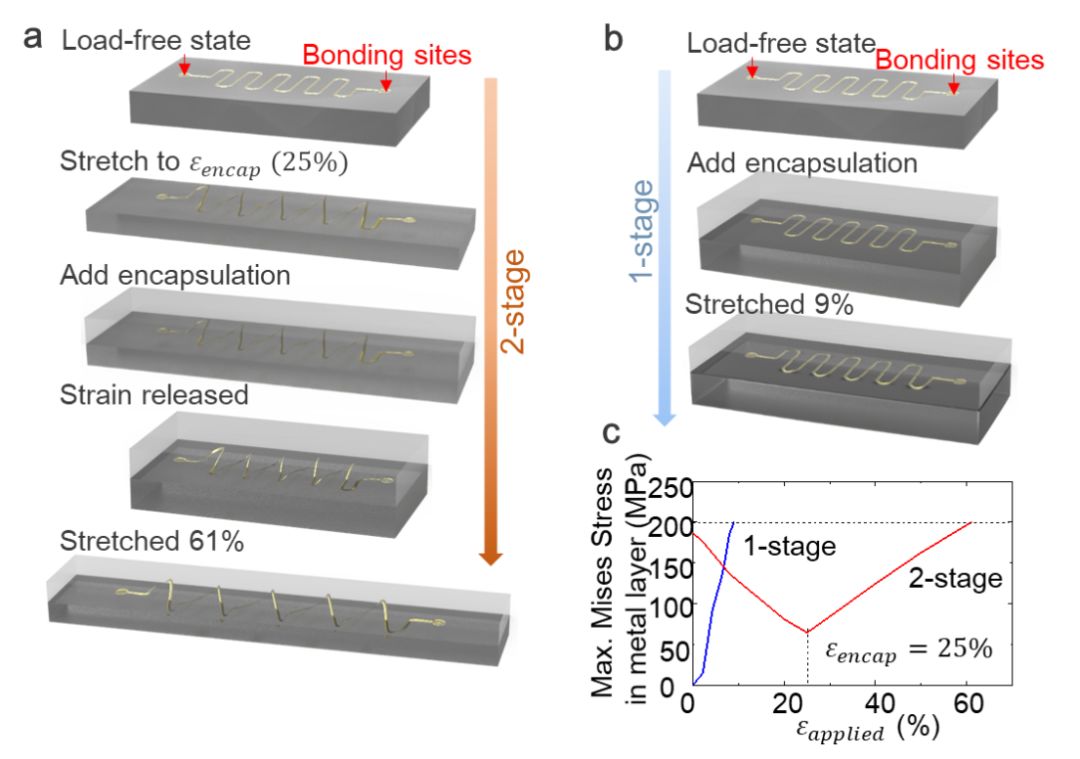
图 1 “两步封装”方法概念阐释(a)两步封装流程示意图;(b)一步封装流程示意图;(c)不同封装方法下金属层中的应力随拉伸应变变化曲线。
清华大学的张一慧副教授团队,与美国西北大学的黄永刚教授团队合作,提出了一种基于固体封装的 “两步封装”方法。该方法巧妙利用了柔性导线拉伸屈曲形成的三维结构,释放了基底对导线的约束作用,较好地维持了封装后柔性器件的延展性。这一方法的概念阐释如图1所示。传统的“一步封装”封装方式在器件自由平整状态下浇注固体封装材料,这一方法封装的器件拥有较低的可延展性(图1b)。而“两步封装”方法在第一步首先将器件拉伸至一个中间状态,此时器件承受的拉伸应变称之“封装应变”,第二步在这个中间状态浇注封装材料,待封装材料固化以后释放基底的封装应变(图1a)。这样的封装方式使得器件至少可以拉伸至“封装应变”这一应力最低状态(图1c),同时封装应变是一个可优化参数,当释放基底的封装应变后,导线金属层恰好达到其屈服应力,该封装应变即为其临界封装应变。
“两步封装”方法能够提高器件延展性的关键在于导线的三维构型以及三维构型带来的独特的变形模式。当基底拉伸至封装应变时,蛇形导线拉伸屈曲,产生面外变形。浇注封装材料并释放封装应变后,封装材料 维持了蛇形导线的三维构型,使其无法恢复平整状态。当器件受到拉伸载荷时,三维构型的蛇形线主要与较软的封装材料相互作用,并可以通过进一步的三维变形来适应更大的拉伸应变,从而具备了更高的延展性。与之相对比,“一步封装”的蛇形线受到基底的约束,难以实现较大的面外变形,容易产生应力集中。
对于一些广泛应用的二维蛇形导线或分型导线来说,传统“一步封装”后的弹性延展率只有大约10%,如图2b所示。如果采用“两步封装”,在合适的设计参数下,二维蛇形导线可以实现六倍的延展性的增强,二维分型导线可以实现四倍的延展性增强(图2d)。同时,在“两步封装”的未拉伸和拉伸状态,都可以通过实验图片(图2c 和图2d)观察到导线处于三维变形状态。
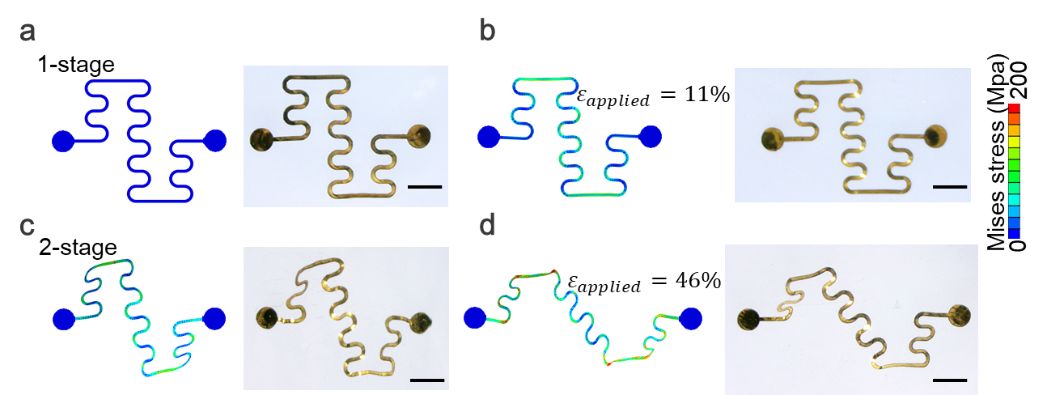
图 2 分型蛇形导线“一步封装”与“两步封装”实验(a)“一步封装”导线0%拉伸应变时的仿真与实验对比;(b)“一步封装”导线11%拉伸应变时的仿真与实验对比;(c)“两步封装”导线0%拉伸应变时的仿真与实验对比;(d)“两步封装”导线46%拉伸应变时的仿真与实验对比;标度尺长1mm
“两步封装”方法不仅适用于以前广泛应用的平面蛇形导线结构,还适用于延展性更高的空间螺旋导线。对于该团队近期提出的通过压缩屈曲技术制备的“三维螺旋”导线,这种封装方式仍然可以大大提高其可延展性,但背后的机理较二维导线略有不同。在较大的压缩成型应变下,“一步封装”下的三维螺旋导线顶端发生转动,会形成“结”状结构(图3a和图3b红虚线框处)。顾名思义,“结”状结构在拉伸下很难解开,限制了三维螺旋导线的延展性。而在“两步封装”下,通过施加封装应变,可以提前将“结”状结构解开,浇注封装材料后,封装材料会对螺旋线有约束作用,避免“结”状结构的恢复(图3c和图3d红虚线框处),因而提高了可延展性。
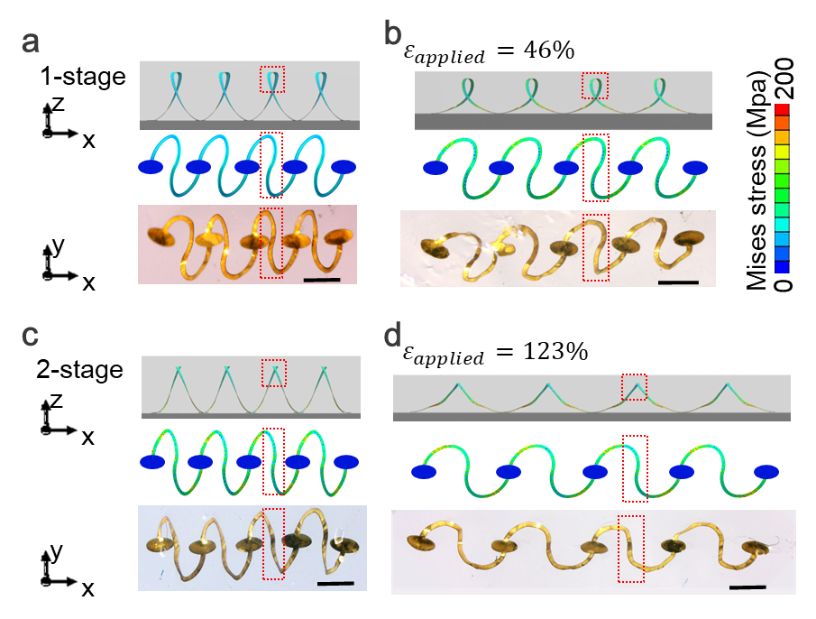
图 3 螺旋线导线“一步封装”和“两步封装”实验(a)“一步封装”导线0%拉伸应变时的仿真与实验对比;(b)“一步封装”导线46%拉伸应变时的仿真与实验对比;(c)“两步封装”导线0%拉伸应变时的仿真与实验对比;(d)“两步封装”导线123%拉伸应变时的仿真与实验对比;标度尺长1mm
利用这一新型封装方法,团队设计制备了两种不同的功能器件原型,为固体封装的可延展器件提供了示例。图4a和图4b展示的是一个LED阵列,其在复杂的加载形式下仍能够正常的工作。图4c和图4d展示是一个三维可拉伸的天线,其通过三维压缩屈曲组装方法制备,并采用“两步封装”,可以在较大的拉伸应变下为LED维持稳定的能量供应。
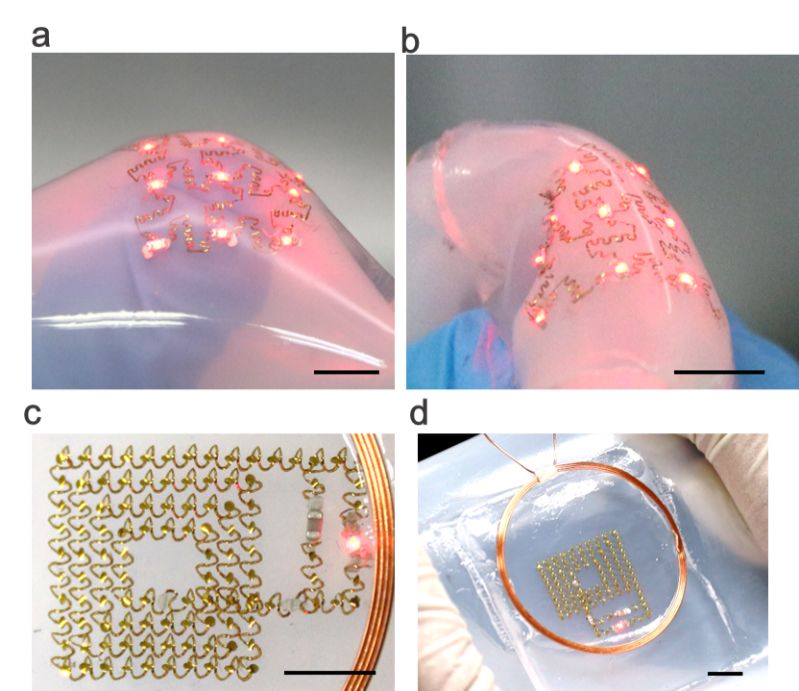
图 4 应用“两步封装”的LED器件(a)LED阵列在顶起载荷下的工作状态;(b)LED阵列在弯折载荷下的工作状态;(c)三维可拉伸天线;(d)无线供能LED器件在50%拉伸载荷下的工作状态;标度尺长5mm
清华大学张一慧副教授为本文通讯作者。美国西北大学博士生厉侃,清华大学博士生程旭为本文的第一作者。该研究成果得到了国家自然科学基金项目、国家重点基础研究发展计划等项目的资助。
“本文由新材料在线®平台入驻媒体号高分子科学前沿提供,观点仅代表作者本人,不代表本网站及新材料在线®立场,本站不对文章内容真实性、准确性等负责,尤其不对文中产品有关功能性、效果等提供担保。本站提醒读者,文章仅供学习参考,不构成任何投资及应用建议。如需转载,请联系原作者。如涉及作品内容、版权和其它问题,请与我们联系,我们将在第一时间处理!本站拥有对此声明的最终解释权。”