设置登录密码
*密码
*确认密码
完善信息
*真实姓名
*公司名称
*您的职位
城市
*邮箱
*主营产品
*行业
企业类型
材质
功能







来源:新材料在线|
发表时间:2019-01-08
点击:30404
有文献报道,具有辅助驾驶或自动驾驶功能的汽车可减少或避免各种交通事故的发生。进一步的研究表明,如果提前0.5秒向驾驶员提出警告,则60%的汽车追尾事故可以避免;如果提前1.5秒警告则90.96%的追尾事故可以避免。这就要求摄像头技术在自动驾驶汽车开发中有更多、更好的应用。
一、摄像头工作原理、结构、分类
目前智能手机越来越普及,老人和小孩拿到手机,不仅可以拍照了,而且会录像了。如今智能手机基本配置2个摄像头。好在高清晰度的摄像头成本已经比较低了。其工作原理,工程师在中学物理课都学过,从事自动驾驶汽车开发的工程师,有必要再复习一遍。
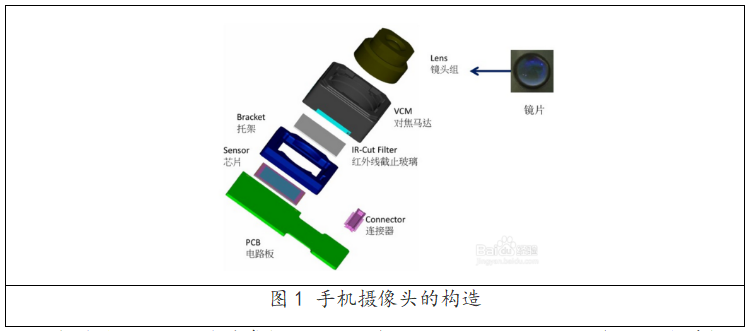
1. 摄像头工作原理
景物通过镜头(LENS)生成的光学图像投射到图像传感器表面上,然后转为电信号,经过A/D(模拟信号)转换后变为数字图像信号,再送到数字信号处理芯片(DSP)中加工处理,通过显示器就可以看到图像了。
2.摄像头结构
摄像头主要有镜头、CCD图像传感器、预中放、AGC、A/D、同步信号发生器、CCD驱动器、图像信号形成电路、D/A转换电路和电源的电路构成。
摄像头的主要图像传感部件是CCD(Charge Coupled Device),即电荷耦合器件, 是电耦合器件(Charge Couple Device)的简称,它能够将光线变为电荷并可将电荷储存及转移,也可将储存之电荷取出使电压发生变化,它具有灵敏度高、畸变小、寿命长、抗震动、抗磁场、体积小、无残影等特点,是理想的摄像元件。
3.摄像头的分类
①依成像色彩划分:黑白摄像机、彩色摄像机2类;
②依分辨率灵敏度等划分:一般型:像素在25万像素(512*492)、高分辨率型:38万以上像素;
③按CCD靶面大小划分:目前采用的芯片大多数为1/3"和1/4";
④按扫描制式划分 PAL制、NTSC制, 中国采用隔行扫描(PAL)制式;
⑤按照度划分,CCD又分为:普通型、月光型、星光型、红外型;
⑥按外观分:有机板型、针孔型、半球型。
二、摄像头在自动驾驶汽车系统的地位及布置方位
自动驾驶系统的体系结构一般分为:
①环境感知层:为了提高环境感知的可靠性,一般采用多传感器信息的数据融合技术(注:摄像头处于环境感知层);
②决策控制层:决策控制层利用人工智能、自动控制等理论对环境感知层所获得的信息做出 策,并向执行机构发出控制命令,包括转向、刹车或加速等的控制;
③操作执行层:主要指各种执行器,包括转向、调速、制动等执行装置。
其中,环境感知层是各种传感器,为决策控制层提供车辆所在道路及周围的环境信息。
摄像头自动驾驶汽车布置方位,有前后、左右4个方位(见图1)。每一个摄像头观察幅度是有限的。
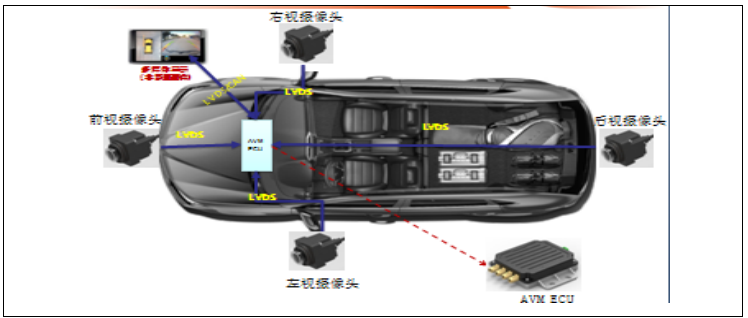

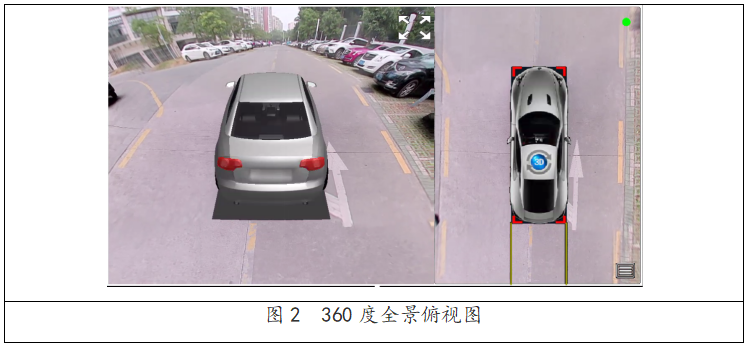
而装在车身前后左右的四个超广角鱼眼摄像头,同时采集车辆四周的影像,经过图像处理单元畸变还原→视角转化→图像拼接→图像增强,最终形成一幅车辆四周无缝隙的360度全景俯视图,见图2。
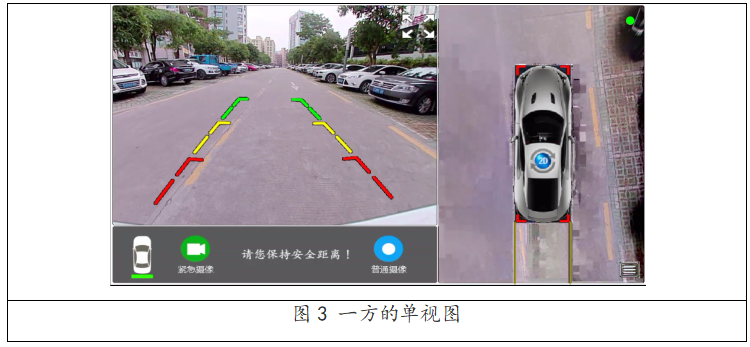
在显示全景图的同时,也可以显示任何一方的单视图,并配合标尺线准确地定位障碍物的位置和距离,见图3。
三、摄像头在自动驾驶汽车的基本功能
①利用车载摄像头,代替驾驶员的眼睛,具有获取的信息丰富能力,如交通信号、交通标志、道路标识、障碍物等信息;
②利用车载摄像头,代替驾驶员的眼睛,获取道路信息,提取车道线,检测障碍物,利用这些信息控制汽车沿着车道安全行驶;
③利用车载摄像头,实时捕获道路场景信息,通过视觉图像处 理、模式识别技术,为自动驾驶系统提供可行驶区域信息;
由车载摄像头组成在视觉导航系统处理系统采用被动式传感器方式,不会产生相互干 扰,同时具有安装方便、价格低廉、适用范围广等优点。
四、车载摄像头安装技术要求
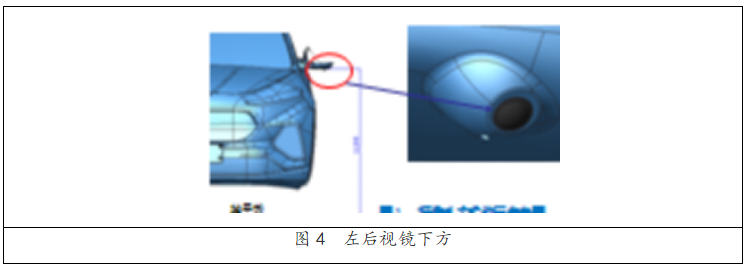
1.左视摄像头布置
① 视场角 H194度 ,V148度;
②摄像头布置在后视镜下方,离地平线高约1199mm(见图4);
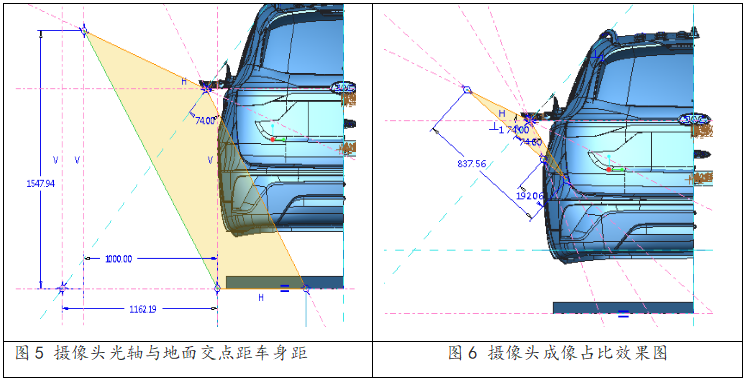
③通过调整摄像头,使摄像头光轴地面交点距车身距离在1M范围内>1.2M的可视高度范围(见图5);
④为保证最佳观看效果,车身占比控制在10%-30%之内;实际模拟结果在车身占比23%,符合要求;(见图6)
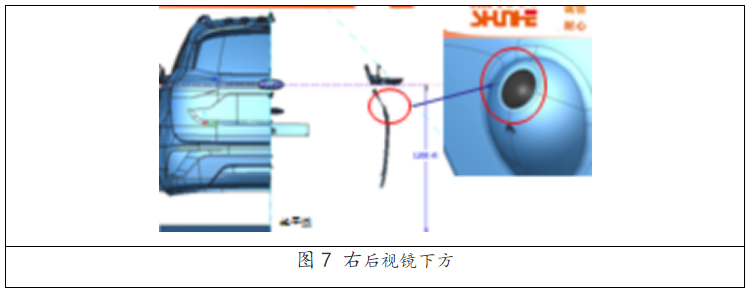
2.右视摄像头布置
①视场角: H194度 ,V148度;
②摄像头布置在后示镜下方,离地平线高约1200.5mm,(见图7);
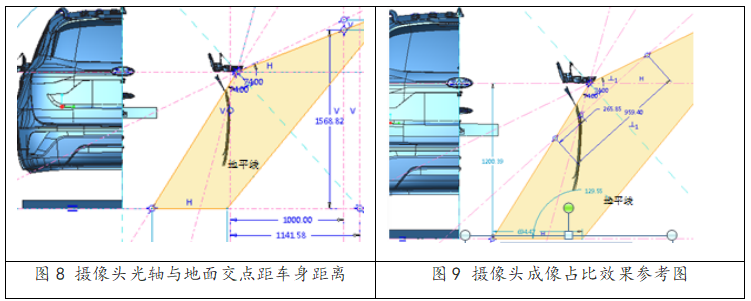
③为保证摄像头足够的视野范围,通过调整摄像头,使摄像头光轴地面交点距车身距离在1M范围内>1.2M的可视高度范围(参考图8);
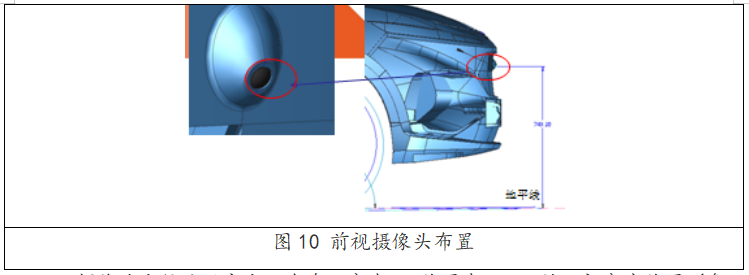
3.前视摄像头布置
1. 视场角:H194度 ,V148度;
2.摄像头光轴地面交点距车身距离在1M范围内>1.3M的可视高度范围(参考图10);
3. 为保证摄像头成像视野的最佳观看效果,车身占比控制在10%-30%之内;实际模拟结果在车身占比29%,符合要求(参考图11);
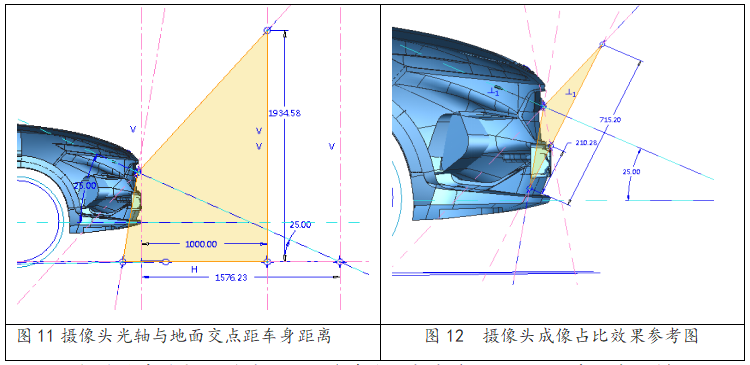
4.摄像头成像视野最佳效果,车身占比控制在10%-30%之内;实际模拟结果在车身占比29%,符合要求(参考图12)。
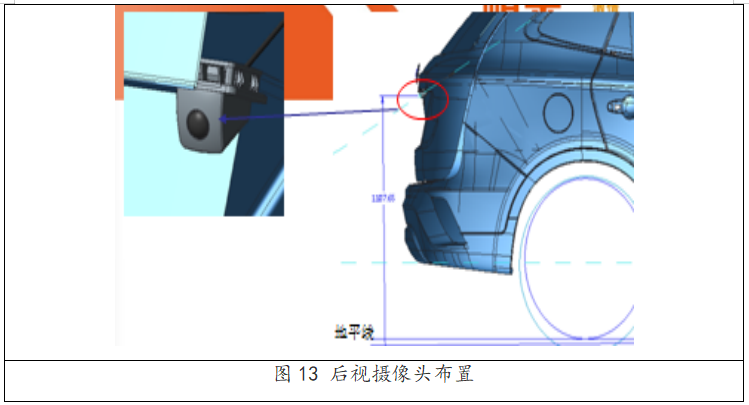
4.后视摄像头布置
1. 视场角:H194度 ,V148度;
2. 摄像头布置在车尾中心上,离地平线高约1107.6mm(参考图13);
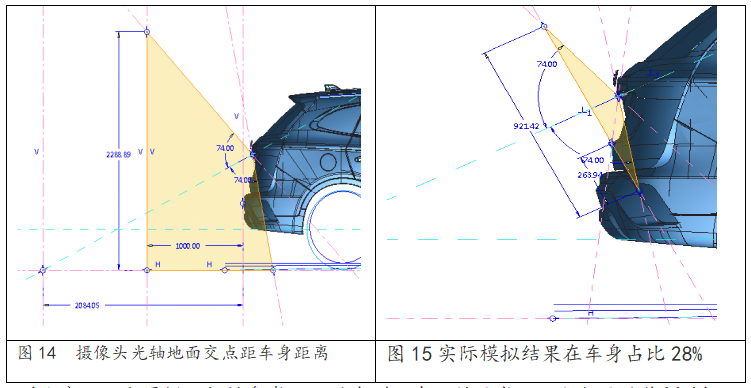
3. 摄像头光轴地面交点距车身距离在1M范围内>1.3M的可视高度范围(参考图14);
4. 摄像头成像视野效果,车身占比控制在10%-30%之内;实际模拟结果在车身占比28%,符合要求(参考图15);
(注意:以上图例,仅供参考,不同车型,有不的要求,工程师要具体调试)
五、摄像机参数和焦距标定
摄像机外参数和焦距的在安装后必须重新标定,且在车辆的行驶过程中容易发生改变。摄像机标定的任务是:
①解决了图像坐标系与世界坐标系之间的转换关系;
②要从摄像机提供的2D图像信息中恢复出客观世界的3D信息,以明确汽车与道路标志线、道路边界及障碍物问的位置关系;
③该参数在汽车行驶过程中近似认可恒定不变,所以手动测量的参数应尽可能的少;
④在线检测摄像机参数的变化,当检测到参数变化时,应能及时进行动 态标定,以修正参数变化。 1
(注意:参数和焦距标定,技术性比较高,方法比较多,各有不足,要长期积累经验。)
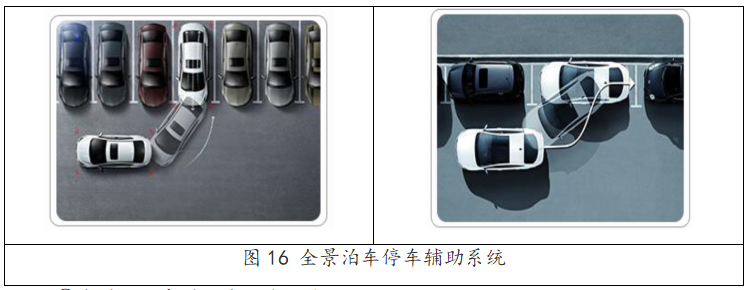
六、国产高清摄像头全景泊车辅助
通过分别安装在车身之前、后、左、右的4个超广角高清摄像头;实时采集车辆周围的影像,经过图像处理单元(AVM ECU)对四个摄像头采集到的原始图像进行矫正、拼接、视角变换后,形成一幅从上往下的全景俯视画面,并实时传送到位于车辆中控台的多媒体显示器上显示。
①在倒车入库或侧方停车过程中的应用案例,见图16。
②在道路狭窄道路中的应用案例,见图17。


③野外环境下案例,见图18

七、总结
摄像头技术在自动驾驶汽车开发中有更多、更好的应用,主要好处是:
①提前0.5秒向驾驶员提出警告,则60%的汽车追尾事故可以避免;
②提前1.5秒警 告则90.96%的追尾事故可以避免。
开发自动驾驶汽车基本目的是提高汽车驾驶过程的安全性。摄像头技术的优势在替代人眼功能,而雷达技术优势在替代人耳朵。自动驾驶汽车研发,在于摄像头技术和雷达技术的持续提升,把摄像头技术和雷达技术用好,是自动驾驶汽车开发工程师的责任。
作者简介
雷洪钧博士,扬子江汽车集团高级工程师、总经理助理(总工程师),中国国电子节能技术协会节能与新能源汽车专家委会专家,国家建设部城市车辆专家委员会理事,全国交通职业教育指导委员会汽车技术专业类指导委员会聘请的专家讲师,中国公路学会客车分会客车市场研究员,中国土木工程学会城市公交学会客车专家委会副主任,中国标准化协会理事,中国管理科学研究院担任过特聘研究员、中科电动汽车产业联盟首席研究员。
本文由文章中写明的作者提供,本文作者与新材料在线®不存在隶属、雇佣等关系。新材料在线®作为平台,仅作为文章的发布渠道,新材料在线®不对内容的准确性、可靠性或完整性承担明示或暗示的保证。本文仅供读者参考,读者据本文所做出的决定或行为,是其基于实际情况及其独立判断做出的。如文章内容、文章中图片等信息存在版权和其它问题,请联系作者。新材料在线®拥有对此声明的最终解释权。