设置登录密码
*密码
*确认密码
完善信息
*真实姓名
*公司名称
*您的职位
城市
*邮箱
*主营产品
*行业
企业类型
材质
功能







来源:中国科学技术大学|
发表时间:2018-10-19
点击:14954
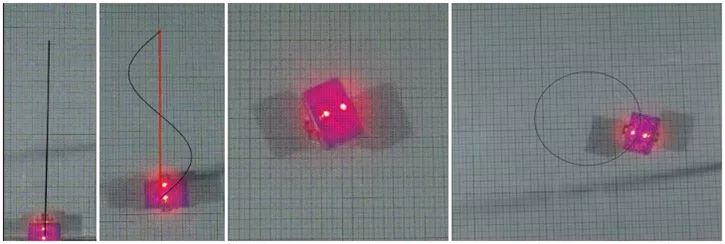
最近,中国科学技术大学精密机械与精密仪器系张世武副教授研究团队、澳大利亚伍伦贡大学李卫华教授研究团队和苏州大学机器人与微系统中心李相鹏副教授研究团队组成的联合研究组,设计了基于镓基室温液态金属的新型机器人驱动器,首次实现了液态金属驱动的功能性轮式移动机器人。近日,该成果以“A Wheeled Robot Driven by a Liquid‐Metal Droplet”为题,发表在《先进材料》杂志上(Adv. Mater. 2018,201805039)。
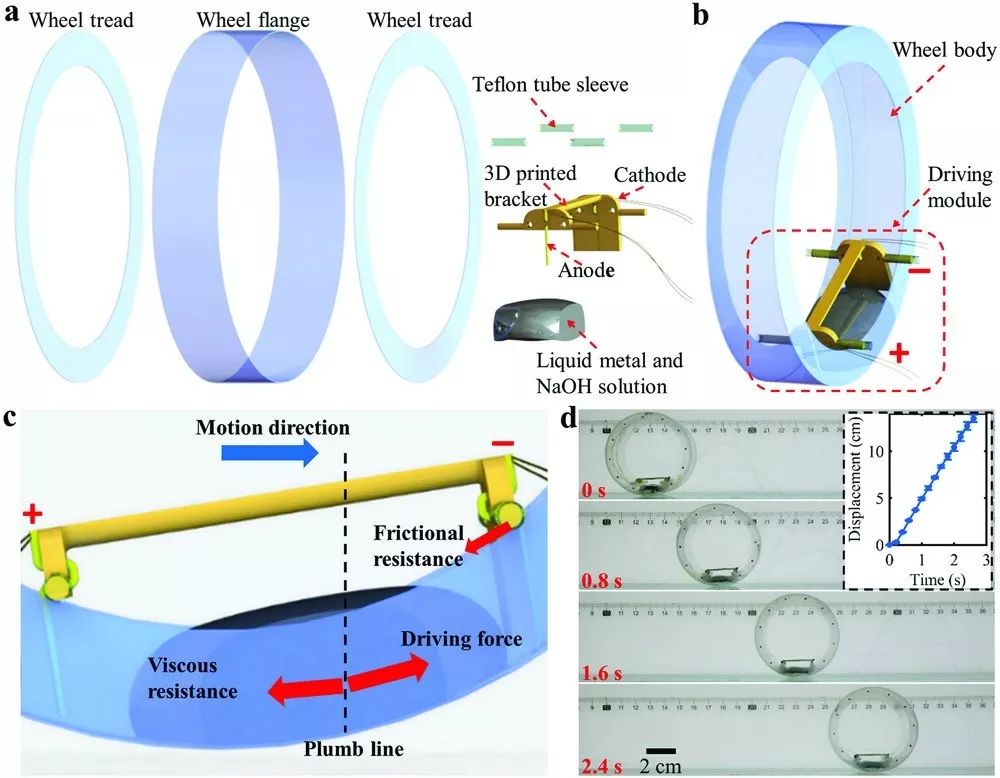
液态金属驱动轮式机器人:a)爆 炸视图,b)三维视图,c)驱动原理示意图,d)运动时序图。
联合组研究者巧妙的将高效液态金属驱动和变重心机构相结合,开发了出结构简单紧凑,驱动性能好的新型液态金属机器人。研究人员设计了一种具有超疏水表面的极轻半封闭轮式结构,将液态金属液滴限制在狭长的轮体内部;通过巧妙设计的随动微型电极支架施加外部电场驱动轮体内液态金属运动,进而持续改变轮式机器人的重心,驱动轮式机器人滚动。研究人员对所提出的新型液态金属机器人做了动力学建模与分析,并通过实验探索了电解液浓度、施加电压、液态金属体积、轮体结构等参数对机器人运动性能的影响,获得驱动运动的最佳参数匹配。
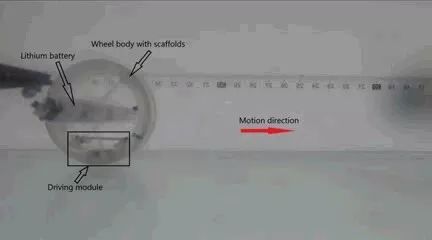
自供能轮式机器人运动
通过集成电池系统,研究人员成功设计了新型液态金属自驱动轮式移动机器人。这一创新研究实现了液态金属驱动装置首次脱离液体在平面运动,有望启发一种新型驱动方式,弥补传统的机器人驱动方式(电机,液压及气动等)结构复杂,体积大以及驱动能效低等不足,促进未来微小机器人及特种机器人系统的发展。
由中国科大、伍伦贡大学和苏州大学组成的联合研究组近年开始研究液态金属的驱动特性及其在机器人上的应用,取得了系列进展。联合研究团队设计了以液态金属液滴阵列作为柔性轮承载及驱动的微型小车,集成电源、控制电路、传感器以及液态金属驱动机构于一体,实现了2D平面内的自主运动,该小车无任何机械传动,具有运动平滑柔顺、无噪声、低振动、成本低廉、易于制造等特点,有望在自动生产线以及实验室自动化中大展身手。该成果近日发表在《IEEE Transactions on Industrial Informatics》上;此外,联合研究团队首次发现了液态金属在外磁场作用下的非常规运动现象,并揭示了其内在机理。该研究实现了通过外部磁场对不经过任何改性的纯液态金属的运动控制,丰富了液态金属的驱动方法,有利于推动液态金属驱动装置的大规模应用。该成果也于近日发表在《Soft Matter》上。
液态金属柔性轮自驱动小车在平面内的各种运动
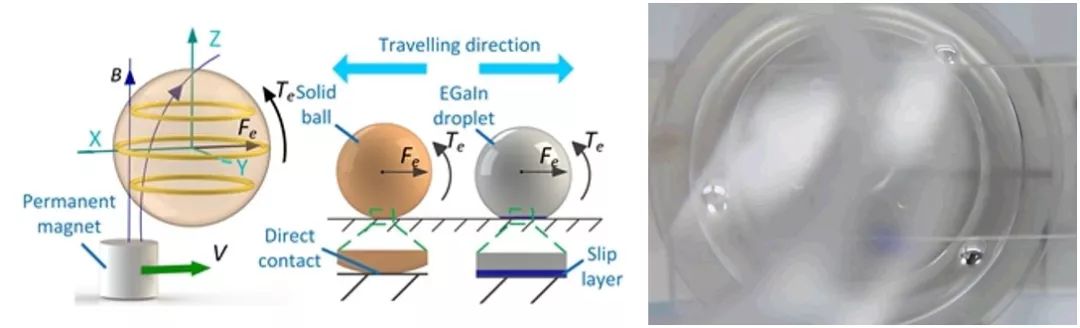
磁场驱动纯液态金属的非常规运动机理及在磁场下的追逐融合行为
[声明]本文来源于互联网转载,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性、准确性等负责,尤其不对文中产品有关功能性、效果等提供担保。本站文章版权归原作者所有,内容为作者个人观点,本站提醒读者,文章仅供学习参考,不构成任何投资及应用建议,如需转载,请联系原作者。如涉及作品内容、版权和其它问题,请与我们联系,我们将在第一时间处理!本站拥有对此声明的最终解释权。