设置登录密码
*密码
*确认密码
完善信息
*真实姓名
*公司名称
*您的职位
城市
*邮箱
*主营产品
*行业
企业类型
材质
功能







来源:材料科技在线|
发表时间:2018-08-11
点击:12803
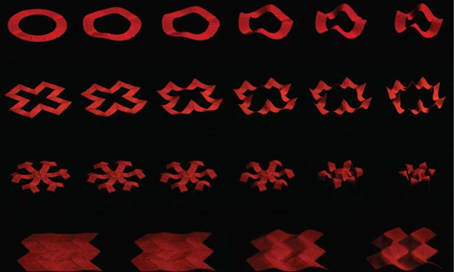
图为不同磁性活性材料的延时照片。图片来源:麻省理工学院软体活性材料实验室
新型3D打印机器人可以挤进像墙壁裂缝一样狭小的空间里,还可以跳过绊网或者在车下爬行,这意味着它可以完成几乎所有复杂危险的军方任务。
陆军纳米技术研究所(ISN)位于麻省理工学院,其中的研究人员成功开发出了一个3D打印平台,可以对复杂的磁驱动设备进行建模和设计。这种新方法需要一个装有电磁喷嘴的3D打印平台,以及一种注入了磁性粒子的新型3D打印墨水。这项新发现可以帮助人们开发新的生物医学应用,完成磁墨水优化以加强软机器人功能,还可以将按需应变的材料系统集成到士兵系统中。
在必要的时候,军方需要将软机器人的开发和制造作为研究重点之一。这项研究是由Aura Gimm博士在美国陆军研究所的研究办公室进行的。

印刷工艺和材料组成示意图。铁磁粒子嵌入到复合油墨中并在打印之前利用磁场重新定位。图片来源:美国陆军
这项技术可以制造出具有爬行、滚动、跳跃或抓取功能的磁性3D打印结构来满足军方的需求。这项研究工作可以控制3D打印设备的磁定向,使它们能够迅速地转变成新的复杂结构,并根据外部磁场做出相应的反应。而这些复杂的形状变化可以得到广泛的应用,例如可重新配置的软电子设备、可以跳跃的机械超材料或者一个可以爬行、滚动、捕捉快速移动物体或运送药物的软机器人。
尽管其他研究已经利用磁性激活材料完成了简单的动作,但这种新方法既能利用磁控装置进行建模和设计,也能利用软机器人执行陆军相关的复杂任务。
该方法的基础是直接利用含有铁磁微粒子墨水的弹性体复合材料进行打印,并在打印时将磁场应用于喷嘴。该技术在应用中重新定位粒子,将带有图案的磁极性传递给印刷的细丝。这种方法允许研究人员在复杂的3D打印软质材料中对铁磁域进行编程,从而实现一组以前无法实现的转换模式。印刷软材料的驱动速度和功率密度比现有的3D印刷的活性材料要大得多。
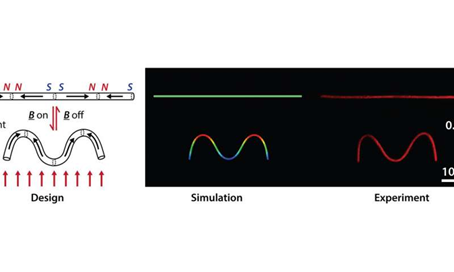
有限元模型的模拟以及一种单纤维编码和交变磁域的实验结果都呈现出“m”形状。图片来源:麻省理工学院
“本文由新材料在线®平台入驻媒体号材料科技在线提供,观点仅代表作者本人,不代表本网站及新材料在线®立场,本站不对文章内容真实性、准确性等负责,尤其不对文中产品有关功能性、效果等提供担保。本站提醒读者,文章仅供学习参考,不构成任何投资及应用建议。如需转载,请联系原作者。如涉及作品内容、版权和其它问题,请与我们联系,我们将在第一时间处理!本站拥有对此声明的最终解释权。”